
ライフサイクルマネジメントセンター
桟橋上部工点検用ROV
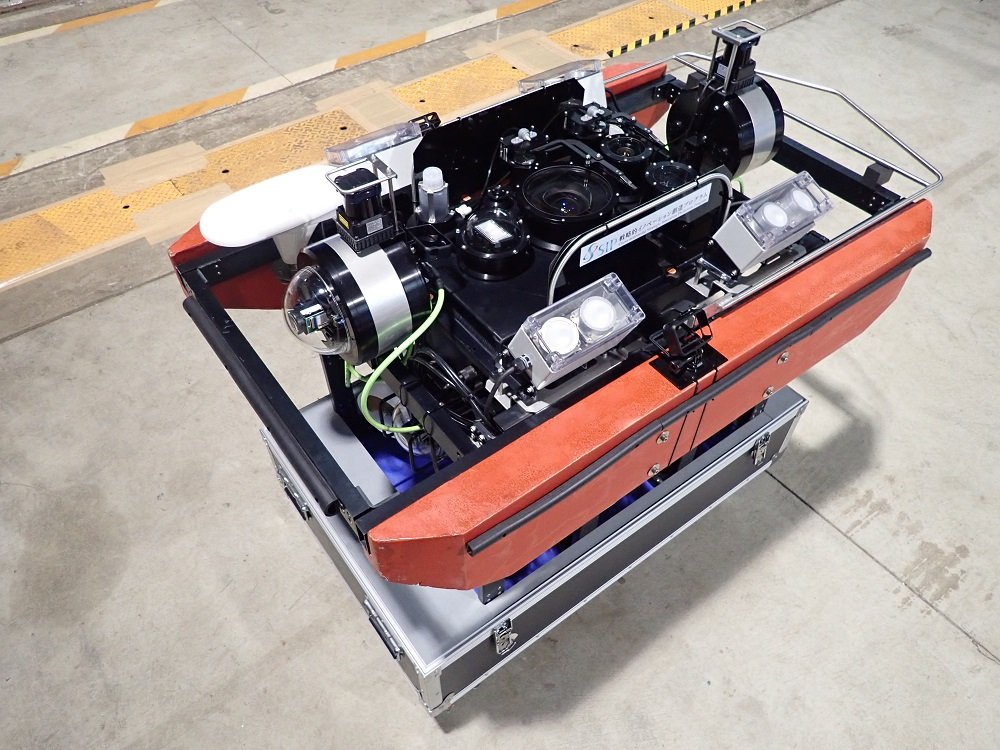
Life Cycle Management Research Center 「桟橋上部工点検用ROV」は、陸上のオペレータの遠隔操作によって桟橋上部工下面の状況を撮影するROV(Remotely Operated Vehicle)型の点検装置です。
特徴は、GPS等の衛星測位技術が利用できない桟橋下面において、予め与えた鋼管杭の配置情報と、上部工撮影装置に搭載したLRF(Laser rangefinder、測域センサ)から得られる鋼管杭と点検用ROVとの相対位置を逐次比較することによって、自機の位置を推定できることです。これにより、位置情報(座標系)が付加された撮影画像の取得と未撮影防止機能(フットプリント表示)、鋼管杭や浮遊物等の障害物への衝突を回避する機能(自動衝突回避)の付加が可能となりました。撮影画像への位置情報の付加は、SfM/MVSによる上部工画像の3D化の精度向上や3D化のために必要な画像枚数の低減にも寄与します。
桟橋上部工点検用ROVの主な仕様
| 項目 |
仕様 |
|---|---|
| カメラ | 点検用DSLR×1 (Full-size6016×4016, f=14mm) 画像処理用GigE×1 (1/2'1024×1024, f=3.5mm) 操縦用GigE×3(気中 前後, 水中 前) |
| 推進器 | 水平スラスタ×4 (菱型配置),垂直×2 |
| 性能 | 最大前進速度 約1.5kts |
| センサ・機能 | レーザ距離計×1, レーザマーカ×1, LRF×2 , 方位ジャイロ, 桟橋下LRF利用測位, 衝突回避 |
| 寸法・質量 | L1200×W800×H925 (低床時825), 約100㎏ |
桟橋上部工点検用ROV
貸付
桟橋上部工点検用ROVは「貸付要領」に従って貸付を行っております。
詳しくは以下までお問い合わせください。
【問合せ先】
- 桟橋上部工点検用ROVについて
ロボティクス研究グループ 046-844-5062 - 手続き等にについて
港湾空港技術研究所 管理調整・防災部 管理課 財産係 046-844-5039
【参考】

世界に貢献する技術をめざして
国立研究開発法人 海上・港湾・航空技術研究所
港湾空港技術研究所
Port and Airport Research Institute
〒239-0826 神奈川県横須賀市長瀬3丁目1番1号 TEL 046(844)5010
Copyright © Port and Airport Research Institute. All rights reserved.