
Major Research Study on automatic operating methods of inspection underwater robots of underwater port structures
This research project was conducted to confirm the underwater condition of emergency structures in the event of a disaster and underwater structures and visual survey of underwater structures by divers will be implemented effectively in order to promote using to grasp situation in advance, the purpose of the project is to automate part of the underwater robot's navigation. The robot was automated to acquire images of the underwater portion of an upright wall of a structure using an underwater robot based on a commercially available underwater drone as the base machine. First, we installed a wireless communication capability on the base machine to avoid the risk of cable entanglement with target structures. We then installed a wireless communication antenna on it in order to be able to receive data from the robot remotely operate it for the operator on land via radio communication (wireless LAN) when the robot is moving along the watersurface. In addition, as it is not possible to communicate with the robot while it is submerged, we created an external module that will be attached to the robot to enable it to operate autonomously. We also installed an underwater camera on the robot for inspection purposes. We then conducted water tank experiments to test the robot's autonomous navigation function, which allowed us to verify the robot's ability to automatically operate itself while aiming its underwater camera at the vertical wall and travelling along the structure while maintaining a specified distance.

Robot used in the experiment
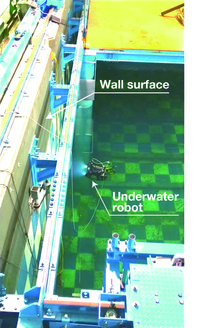
Experiment in progress

Creating technologies that Contribute to the World
National Institute of Maritime, Port and Aviation Technology
Port and Airport Research Institute
3-1-1 Nagase,Yokosuka City, Kanagawa Prefecture, 239-0826 Japan Phone +81-46-844-5010
Copyright © Port and Airport Research Institute. All rights reserved.